Recently, I read the the Google Bigtable paper, and what a fun read it was.
And I asked myself, how much of it can I fit in a single go file, with no external dependencies whatsoever, and it turns out, quite a lot. And that’s what this blog post is about. My implementation of this famous paper.
1. What Is Bigtable?
Bigtable is a distributed storage system designed to scale to petabytes of data across thousands of commodity servers. Despite being called a “table,” it is not a relational database.
I mean sure it does resemble a database, but it does something different, and it does it really well. It provides clients with a simple data model that supports dynamiccontrol over data layout and format, and allow clients to reason about the locality properties of the data represented in the underlying storage.
It is a sparse, distributed, persistent, multidimensional sorted map. Very big words right? Don’t be intimidated. It basically means you have sorted dictionary(I’m assuming you’re familiar with python a bit) as your primary data structure.
If this still seems daunting to look at, if translated to golang, this is how it would look like:
type RowKey []byte
func (r RowKey) String() string { return string(r) }
func (r RowKey) Compare(other RowKey) int {
return bytes.Compare(r, other)
}
type Column struct {
Family string
Qualifier string
}
func (c Column) String() string {
return c.Family + ":" + c.Qualifier
}
// This is the "big" table
type Cell struct {
Row RowKey
Col Column
Timestamp Timestamp
Value []byte
Deleted bool
}
But what was the need of BigTable?
When data you have to store gets to a humongous size, you need certain things in check:
- Wide applicability
- Scalability
- High Performance(of course)
- High availability!!!
BigTable solved for these problems, BigTable was used for a variety of workloads, from latency sensitive data serving to heavy throughput batch processing. Every piece of data is indexed by three coordinates:
(row key, column key, timestamp) → value
- Row keys are arbitrary byte strings, sorted lexicographically. All reads and writes to a single row are atomic.
- Column keys are grouped into column families (e.g.,
anchor,contents). Within a family, column qualifiers can be anything. - Timestamps allow multiple versions of a value to coexist. The system can be configured to keep the latest N versions or all versions within a time window.
The data model gives users enormous flexibility. Google’s original use cases included the web index (storing crawled HTML with timestamps), Google Analytics, Google Earth, and Gmail.
Pretty simple right? Now let’s discuss what do each field in the Cell struct actually mean.
2. Constants and Configuration
Before we get into the fun stuff, let’s talk about the boring-but-important numbers that control how the whole system behaves. Think of these as the dials you’d turn if you were deploying this in production.
const (
DefaultMemtableMaxSize = 4 * 1024 * 1024
DefaultMajorCompactionThreshold = 5
MetadataTableName = "METADATA"
MaxTabletsPerServer = 1000
ChubbyLeaseDuration = 10 * time.Second
...
)
DefaultMemtableMaxSize(4 MB): Once an in-memory write buffer (the memtable) reaches this size, it is frozen and flushed to disk as an SSTable. In production Bigtable this is configurable per table.DefaultMajorCompactionThreshold(5): After 5 SSTables accumulate for a tablet, a major compaction is triggered to merge them into one, reclaiming space from deleted data.MetadataTableName: The special internalMETADATAtable stores the locations of all user tablets. It is managed by Bigtable itself, not by users.MaxTabletsPerServer(1000): A safety cap on how many tablets one server can hold. Real servers handle tablet counts based on memory and I/O capacity.ChubbyLeaseDuration(10s): How long a Chubby session remains valid between heartbeats. If a tablet server fails to renew within this window, the master declares it dead.LatestTimestamp: A sentinel value (MaxInt64) used when searching for the newest version of a cell. By sorting timestamps in descending order, the newest version always comes first.
3. Core Data Types
This section defines the fundamental vocabulary of the system, the building blocks every other component uses.
Timestamp
type Timestamp int64
func Now() Timestamp {
return Timestamp(time.Now().UnixMicro())
}
Timestamps are microsecond-precision Unix timestamps stored as int64. The paper states that clients can assign their own timestamps for controlled versioning, or let Bigtable assign them automatically. Now() is the automatic assignment path.
RowKey
type RowKey []byte
func (r RowKey) Compare(other RowKey) int {
return bytes.Compare(r, other)
}
Row keys are raw byte slices. The entire Bigtable data model hinges on lexicographic ordering of row keys, this is what makes range scans efficient. A famous design pattern from the paper is reversing domain names (com.google instead of google.com) so that pages from the same domain cluster together on disk.
Column and ColumnFamily
type Column struct {
Family string
Qualifier string
}
A column is identified by two parts separated by a colon: family:qualifier. The family (anchor, contents, language) is defined at table-creation time and controls compression, versioning policy, and memory residency. The qualifier is dynamic, it can be anything and is not declared in advance. This is what makes Bigtable “sparse”: a row only stores the columns it actually has values for.
Cell
type Cell struct {
Row RowKey
Col Column
Timestamp Timestamp
Value []byte
Deleted bool
}
A Cell is one versioned value at a specific (row, column, timestamp) coordinate. The Deleted flag makes it a tombstone , a marker that says “this cell was deleted.” Tombstones are how deletions propagate through the system before a major compaction permanently removes the data.
CellKey and CompareCellKeys
type CellKey struct {
Row, Family, Qualifier string
Timestamp Timestamp
}
func CompareCellKeys(a, b CellKey) int {
// row asc → family asc → qualifier asc → timestamp desc
}
CellKey is the sort key used throughout the system, in the memtable, in SSTables, and during merge operations. The critical detail is that timestamps are sorted descending: newest versions come first. This means a simple forward scan naturally yields the most recent version first, which is what most reads want.
Mutation
type Mutation struct {
Type MutationType
Col Column
Timestamp Timestamp
Value []byte
}
Mutations represent write operations. There are four types: MutationSet (write a value), MutationDelete (delete a cell), MutationDeleteRow (delete all cells in a row), and MutationDeleteFamily (delete all cells in a column family). Per-row atomicity means all mutations in one Write() call either all succeed or all fail.
RowRange
type RowRange struct {
Start RowKey // inclusive
End RowKey // exclusive; nil means unbounded
}
RowRange defines a half-open interval [Start, End) over row keys. This is the unit of work for scans. nil endpoints represent unbounded ranges, meaning “start of table” or “end of table.” Tablets are also described by RowRanges , a tablet server only accepts reads and writes for row keys within its assigned range.
4. Schema
type TableSchema struct {
Name string
ColumnFamilies map[string]*ColumnFamily
}
A TableSchema is the schema object created when a user calls CreateTable. In Bigtable, schema changes are lightweight, you can add or remove column families without touching the data. The ColumnFamily struct stores per-family tuning parameters:
type ColumnFamily struct {
Name string
MaxVersions int
TTL time.Duration
Compression string // "none", "snappy", "zlib"
BloomFilter bool
InMemory bool
}
MaxVersions: How many historical versions to keep. Once the limit is exceeded, old versions are garbage-collected during compaction.TTL: Time-to-live. Versions older than this duration are automatically deleted during compaction.Compression: SSTables for this family will be compressed using the named algorithm. Compression is per-family because some data (like HTML) compresses well while other data (like encrypted blobs) does not.InMemory: If true, all SSTables for this column family are kept in memory for faster reads. The paper uses this for theMETADATAtable’s location columns.
AddColumnFamily enforces uniqueness and sets default values. GetColumnFamily uses a read lock for concurrent access.
5. GFS : The Storage Foundation
type GFS struct {
baseDir string
mu sync.Mutex
files map[string]*GFSFile
}
In the real Bigtable, the Google File System (GFS) provides a reliable, replicated, distributed file system. GFS handles replication, fault tolerance, and large sequential I/O. Our implementation simulates GFS using the local filesystem under /tmp/bigtable_gfs.
The GFS struct tracks a registry of open files and delegates to standard os package operations. The key methods are:
Create(name): Creates a new file, ensuring all parent directories exist.Append(name, data): Opens the file in append mode and writes bytes atomically. This is the primary write pattern for the commit log.Read(name): Returns the entire file contents. In real GFS, reads can be streamed in chunks.Write(name, data): Atomically replaces a file’s content. This is used for SSTable creation: write the whole file at once, then make it visible.Register(name): Registers a file that already exists on disk (used during recovery).
The design of GFS is central to Bigtable’s architecture. Because GFS replicates data across machines, Bigtable does not need to implement its own replication. SSTables are immutable once written, which makes them trivially replicable and cacheable.
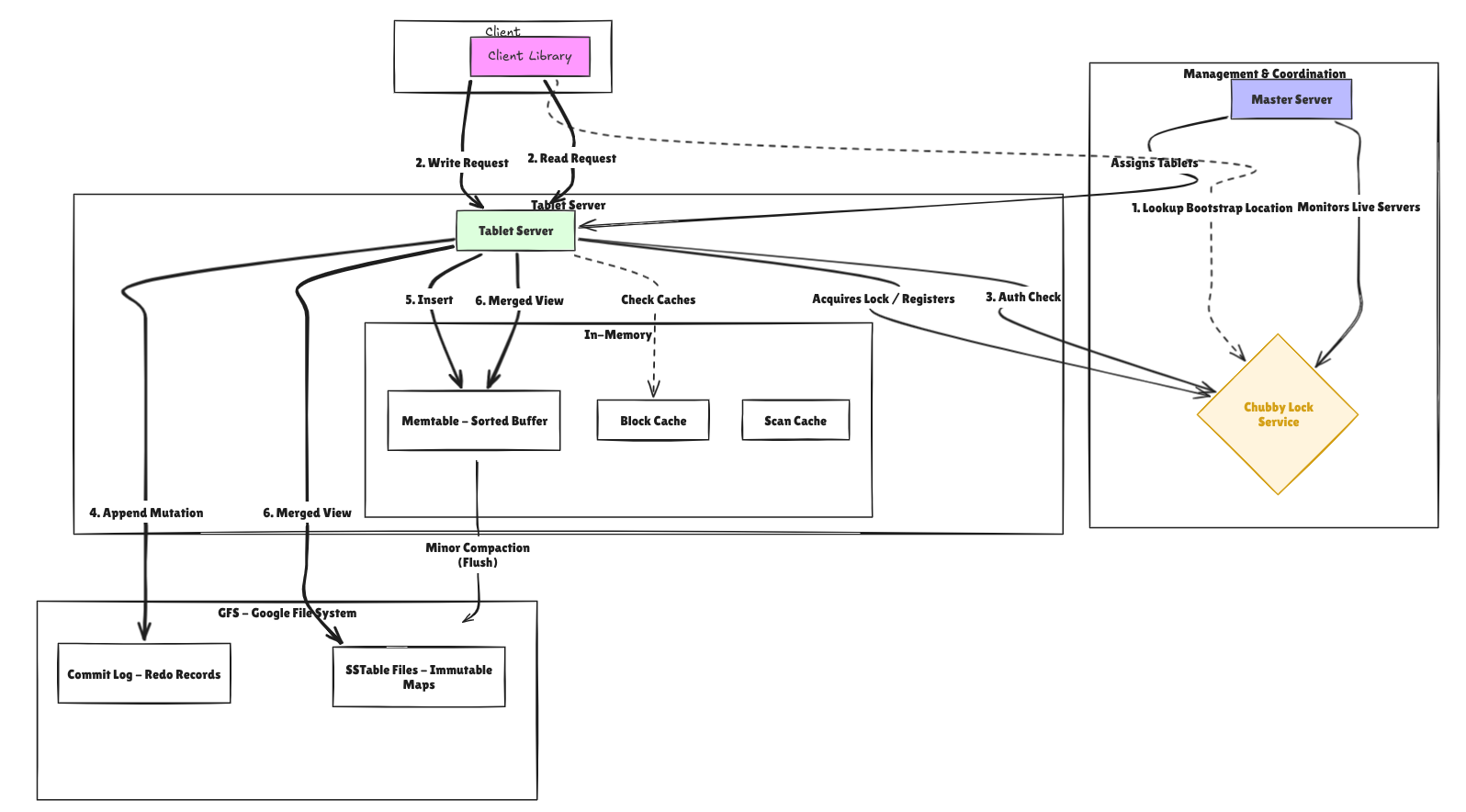
6. Chubby: The Lock Service
Chubby is a distributed lock service that Bigtable relies on for five critical functions:
- Master election: Only one master can hold the master lock at a time.
- Tablet server liveness: Each tablet server holds a lock; if the lock is lost, the master knows the server is dead.
- Root tablet location: Chubby stores the address of the root tablet, which is the entry point for the tablet location hierarchy.
- ACLs: Access control lists are stored as Chubby files.
- Schema bootstrap: The existence of a Bigtable cluster is anchored in a Chubby directory.
type Chubby struct {
nodes map[string]*ChubbyNode
sessions map[string]*ChubbySession
}
type ChubbyNode struct {
Path string
Content []byte
Lock string // session ID holding the lock
Watchers map[string]chan struct{}
}
Sessions and Leases
type ChubbySession struct {
id string
leaseExp time.Time
}
Every participant (master, each tablet server, each client) opens a Chubby session. Sessions have leases that must be periodically renewed via RenewLease(). If a lease expires, the session becomes invalid, any locks held by that session are released, and watchers are notified. This is how Bigtable detects server failures without an explicit heartbeat protocol.
Locks
func (c *Chubby) TryLock(path string, sess *ChubbySession) bool {
...
if node.Lock == "" {
node.Lock = sess.id
return true
}
return node.Lock == sess.id
}
Locks are exclusive. TryLock is non-blocking: it returns true if the lock was acquired, false if another session holds it. This is what the master uses for election: whichever process wins the lock first becomes the active master.
Watches
func (c *Chubby) Watch(path string, sess *ChubbySession) (<-chan struct{}, error)
Watches provide event notification. A watcher is notified when a node’s content changes or its lock is released. The master uses watches to detect when a tablet server’s lock node disappears (server died) and to monitor configuration changes.
Pre-created Paths
The constructor creates the standard Bigtable Chubby paths:
/bigtable/master-lock: The master election lock./bigtable/root-tablet-location: Stores where the root tablet lives./bigtable/servers: A directory where each tablet server creates its lock file./bigtable/acls: Access control lists.
7. Bloom Filter
type BloomFilter struct {
bits []uint64
numBits uint
numHash uint
}
Okay, this one is my favorite. A Bloom filter may sound fancy but it does exactly one thing: it tells you whether something is definitely not in a set, or probably is. That asymmetry is surprisingly powerful.
func (bf *BloomFilter) MightContain(key []byte) bool {
for i := uint(0); i < bf.numHash; i++ {
pos := bf.hash(key, i)
if bf.bits[pos/64]&(1<<(pos%64)) == 0 {
return false
}
}
return true
}
Why it matters for performance: Without Bloom filters, a read for a row that doesn’t exist in a given SSTable would require loading and scanning that SSTable’s index from disk. With a Bloom filter, the tablet server can skip the disk read entirely if MightContain returns false. For workloads with many “point reads” of non-existent keys, this can eliminate the majority of SSTable I/O.
The filter uses CRC32 hashing with a seed per hash function. The number of bits and hash functions is computed from the expected item count and desired false positive rate using the standard Bloom filter formulas.
8. Memtable: The In-Memory Write Buffer
type Memtable struct {
entries []MemtableEntry // sorted slice of CellKey -> Cell
size int64
frozen bool
seqNo int64
}
The memtable is the first place every write lands. It is an in-memory sorted buffer maintained in CellKey order. When the memtable reaches the size threshold (DefaultMemtableMaxSize), it is frozen and flushed to GFS as an immutable SSTable. A new, empty memtable takes its place.
Sorted Insertion
func (m *Memtable) Insert(cell *Cell) error {
...
idx := sort.Search(len(m.entries), func(i int) bool {
return CompareCellKeys(m.entries[i].key, key) >= 0
})
// Insert at idx, shifting right
m.entries = append(m.entries, MemtableEntry{})
copy(m.entries[idx+1:], m.entries[idx:])
m.entries[idx] = entry
...
}
Binary search (sort.Search) finds the insertion point in O(log n) time. The slice is then shifted to make room: O(n) in the worst case, but acceptable for in-memory operations. In a production system, a skip list or balanced BST (like a red-black tree) would give O(log n) insertion and avoid the copy. The paper mentions that the original Bigtable used a skip list.
Get and Scan
Get(row, col, maxVersions) uses a binary search to find the starting position (using LatestTimestamp as a sentinel to land before all versions of the key) then walks forward collecting versions.
Scan(rng, families) similarly seeks to rng.Start and walks forward, skipping cells in families not in the filter set.
Freeze
func (m *Memtable) Freeze() {
m.mu.Lock()
m.frozen = true
m.mu.Unlock()
}
Freezing a memtable is a lightweight operation: it just sets a flag. After freezing, the memtable becomes read-only. Write attempts return an error. The frozen memtable is added to the immutable slice on the tablet and remains readable while it is being written to disk.
Iterator
type MemtableIterator struct {
m *Memtable
idx int
}
The iterator provides a cursor over the sorted entries, used during SSTable creation (the writer walks the memtable in order to produce a sorted SSTable).
9. Commit Log: The Write-Ahead Log
type CommitLog struct {
gfs *GFS
path string
seqNo int64
encoder *json.Encoder
file *os.File
}
The commit log is the durability guarantee of the system. Before any mutation is applied to the memtable, it must be durably written to the commit log on GFS. If the tablet server crashes, the log can be replayed to reconstruct the memtable.
One Log Per Server (Not Per Tablet)
Here’s a decision that seems weird at first: instead of each tablet keeping its own log, the entire server shares one. Sounds messy, right? Turns out it’s actually smarter. This dramatically reduces the number of concurrent GFS writes (GFS writes are expensive). The tradeoff is that recovery becomes more complex: when a server fails and its tablets are reassigned to different servers, each new server must sort through the log to find entries relevant to its tablets.
func (cl *CommitLog) Append(tabletID string, cell *Cell) (int64, error) {
cl.mu.Lock()
defer cl.mu.Unlock()
cl.seqNo++
rec := &LogRecord{SeqNo: cl.seqNo, TabletID: tabletID, Cell: cell}
return cl.seqNo, cl.encoder.Encode(rec)
}
Each record is tagged with its tabletID so that during recovery, a server can filter for only the tablets it owns.
Recovery
func (cl *CommitLog) ReadFrom(minSeq int64) ([]*LogRecord, error) {
// JSON-decode all records from disk, filter by seqNo >= minSeq
}
ReadFrom replays the log from a given sequence number. Tablet.Recover() calls this and re-inserts the relevant cells into a fresh memtable. The minSeq parameter allows the system to skip log entries that were already flushed to SSTables before the crash.
10. SSTable: Immutable On-Disk Storage
Once the memtable is full and frozen, it needs to go somewhere permanent. That’s where SSTables come in, immutable files that sit on GFS and never change once written. Immutability sounds like a constraint, but it’s actually what makes everything else easier: caching, replication, concurrent reads, all of it.
File Format
The SSTable binary format consists of four sections:
[ Data Blocks ][ Index Block ][ Bloom Filter ][ Footer (20 bytes) ]
- Data Blocks: Fixed-size blocks of JSON-encoded cells, sorted by
CellKey. Each block is up to 64 KB. - Index Block: A JSON-encoded array of
(blockOffset, firstKey)pairs, one entry per data block. This allows binary search to find the block containing a target key. - Bloom Filter: A JSON-encoded bloom filter covering all
(row, family, qualifier)triples in the file. - Footer: Two
int64values (offsets to the index and bloom filter) and a magic number (0xB16B00B5) for validation.
SSTableWriter
type SSTableWriter struct {
buf bytes.Buffer
index SSTableIndex
bloom *BloomFilter
blockCells []*Cell
maxBlockSize int
}
The writer accumulates cells in blockCells. When the block reaches maxBlockSize, flushBlock() is called:
func (w *SSTableWriter) flushBlock() {
offset := int64(w.buf.Len())
w.index.BlockOffsets = append(w.index.BlockOffsets, offset)
w.index.FirstKeys = append(w.index.FirstKeys, w.blockCells[0].Key())
binary.Write(&w.buf, binary.LittleEndian, uint32(len(w.blockCells)))
for _, c := range w.blockCells {
enc.Encode(c)
}
}
The first key of each block is saved in the index so that readers can binary-search the index to skip directly to the right block.
Finish() flushes the last block, writes the index and bloom filter, writes the footer, then atomically writes the entire buffer to GFS.
SSTableReader
type SSTableReader struct {
path string
gfs *GFS
data []byte
index SSTableIndex
bloom *BloomFilter
loaded bool
}
The reader is lazy, it only loads data from GFS on the first access (load()). This avoids I/O for SSTables that are never read.
Get path:
- Check bloom filter. If
MightContainreturns false, return immediately (no I/O). - Binary-search the index for the block likely containing the key.
- Decode only that block from
data. - Walk the decoded cells looking for matches.
Scan path: Walk all blocks in order, filtering by row range and column families.
11. Tablet: A Contiguous Row Range
A tablet is the fundamental unit of distribution and load balancing in Bigtable. Each tablet covers a contiguous range of rows [StartKey, EndKey) in one table.
type Tablet struct {
ID TabletID
Schema *TableSchema
state TabletState
memtable *Memtable
immutable []*Memtable // frozen, awaiting flush
sstables []*SSTableReader // newest first
blockCache *BlockCache
scanCache *ScanCache
log *CommitLog
gfs *GFS
}
The Merged Read View
The key insight of the tablet’s read path is that at any moment, data for a row may exist in:
- The active memtable (most recent writes)
- Zero or more frozen (immutable) memtables (being flushed)
- Zero or more SSTables on GFS (previously flushed data)
A correct read must return the union of all these sources, sorted by timestamp descending:
func (t *Tablet) Get(row RowKey, col Column, maxVersions int) ([]*Cell, error) {
allCells = append(allCells, mem.Get(row, col, maxVersions)...)
for _, im := range immutable {
allCells = append(allCells, im.Get(row, col, maxVersions)...)
}
for _, sst := range sstables {
cells, _ := sst.Get(row, col, maxVersions)
allCells = append(allCells, cells...)
}
return mergeCells(allCells, maxVersions), nil
}
mergeCells
func mergeCells(cells []*Cell, maxVersions int) []*Cell {
sort.Slice(cells, ...)
// Walk in order, applying tombstones, enforcing version limits
}
mergeCells handles three concerns:
- Deduplication: The same key can appear in multiple sources; the memtable’s version wins.
- Tombstones: If a
Deletedcell is encountered, all subsequent versions of that(row),(row, family), or(row, family, qualifier)are suppressed. - Version limits: Only the first
maxVersionsnon-deleted cells per(row, family, qualifier)group are returned.
Minor Compaction
func (t *Tablet) MinorCompaction() error {
// 1. Freeze active memtable, swap in a new empty one
t.memtable.Freeze()
frozen := t.memtable
t.memtable = NewMemtable(newSeq)
t.immutable = append(t.immutable, frozen)
// 2. Write frozen memtable to a new SSTable
writer := NewSSTableWriter(t.gfs, sstPath)
for _, e := range frozen.entries {
writer.Add(e.cell)
}
writer.Finish()
// 3. Register the new SSTable as the newest
t.sstables = append([]*SSTableReader{reader}, t.sstables...)
}
Minor compaction converts the frozen memtable into an SSTable. It is triggered automatically when the memtable exceeds DefaultMemtableMaxSize. The frozen memtable stays readable until the SSTable is confirmed written, ensuring no data is lost.
Major Compaction
func (t *Tablet) MajorCompaction() error {
// 1. Read all cells from all existing SSTables
// 2. Merge them (mergeCells removes tombstones permanently)
// 3. Write a single new SSTable
// 4. Replace all old SSTables with the new one
}
Major compaction is triggered when more than DefaultMajorCompactionThreshold SSTables exist. It serves two purposes:
- Reclaims storage: Tombstones are only permanently removed during major compaction. Until then, they must be carried through minor compactions.
- Improves read performance: Each additional SSTable is one more source the read path must check. Reducing to a single SSTable minimizes I/O.
The compacting atomic flag prevents concurrent major compactions on the same tablet.
Tablet Split
func (t *Tablet) Split() (*Tablet, *Tablet, error) {
midKey := RowKey(entries[len(entries)/2].key.Row)
leftID := TabletID{..., EndKey: midKey}
rightID := TabletID{..., StartKey: midKey}
return NewTablet(leftID, ...), NewTablet(rightID, ...), nil
}
When a tablet grows too large (not wired up in this demo but structurally complete), it is split at the median key. The master is notified, which updates the METADATA table and reassigns one of the two new tablets. Splits are always initiated by the tablet server (which knows the data), while the master coordinates the resulting reassignment.
Tablet States
type TabletState int
const (
TabletLoading TabletState = iota
TabletServing
TabletCompacting
TabletUnloading
)
State transitions prevent races: a tablet in TabletCompacting state rejects new compaction requests; one in TabletUnloading is being prepared for transfer to another server.
12. Caches: Block Cache and Scan Cache
Two reads of the same row shouldn’t cost the same as two reads of completely different rows. That’s the whole motivation for caching here. Both caches use a simple FIFO eviction policy (a production system would use LRU):
type BlockCache struct {
data map[string][]*Cell
order []string
maxSize int
}
type ScanCache struct {
data map[string][]*Cell
order []string
maxSize int
}
Block Cache
The block cache stores decoded SSTable blocks. Without it, reading the same block twice (e.g., two reads of rows that fall in the same SSTable block) would require two disk reads and two JSON decodes. The block cache is especially valuable for hot row ranges.
Scan Cache
The scan cache stores the final merged results of Get calls, keyed by "get:{row}:{col}". This is a higher-level cache: if the same (row, column) is read multiple times without any intervening writes, the second read is served directly from the cache without touching the memtable or any SSTable.
The scan cache is invalidated after writes (to ensure read-your-writes consistency) and after minor compactions (because the memtable contents changed). The Clear() method wipes the entire scan cache when a compaction completes.
13. Tablet Server
type TabletServer struct {
ID string
chubby *Chubby
session *ChubbySession
lockPath string
gfs *GFS
tablets map[string]*Tablet
commitLog *CommitLog
schemas map[string]*TableSchema
}
The tablet server is the workhorse of the system. It holds a set of tablets, receives direct read/write requests from clients, and manages background compaction.
Startup and Liveness
ts.lockPath = "/bigtable/servers/" + id
chubby.TryLock(ts.lockPath, ts.session)
On startup, every tablet server creates a node in Chubby’s /bigtable/servers/ directory and acquires an exclusive lock on it. As long as this lock is held, the master knows the server is alive. The lock is maintained by the heartbeatLoop goroutine, which calls RenewLease every 2 seconds.
Background Goroutines
Three goroutines run continuously:
heartbeatLoop: Renews the Chubby session lease to maintain liveness.minorCompactionLoop: Polls all tablets for pending flush requests (via theminorFlushChchannel) and callsMinorCompaction().majorCompactionLoop: Polls all tablets for pending major compaction requests (viamajorCompactCh) and callsMajorCompaction().
Using channels for triggering (rather than polling size directly) means compaction is triggered immediately when thresholds are crossed, while the background loops add no overhead when nothing needs to be done.
The Write Path
func (ts *TabletServer) Write(tabletStr string, row RowKey, mutations []Mutation) error {
// 1. Verify session (ACL check via Chubby)
if !ts.session.IsValid() { return err }
for _, m := range mutations {
cell := &Cell{...}
// 2. Write to commit log (WAL), MUST persist before memtable
ts.commitLog.Append(tabletStr, cell)
// 3. Insert into memtable
t.Apply(cell)
}
// 4. Invalidate scan cache for written rows
}
The ordering is critical: the WAL write must complete before the memtable write. If the server crashes after the WAL write but before the memtable write, recovery will replay the WAL and reconstruct the memtable. If the crash happened before the WAL write, neither the WAL nor the memtable has the data, but the client never received an acknowledgment, so it will retry.
The Read Path
func (ts *TabletServer) Read(tabletStr string, row RowKey, col Column, maxVersions int) ([]*Cell, error) {
t, err := ts.getTablet(tabletStr)
return t.Get(row, col, maxVersions)
}
Reads go directly to the tablet’s Get() method, which implements the merged view described in the Tablet section. Clients communicate directly with tablet servers, the master is not involved in the read path at all.
Atomic Read-Modify-Write
func (ts *TabletServer) ReadModifyWrite(tabletStr string, row RowKey, ops []ReadModifyWrite) error {
t.memMu.Lock() // hold the tablet's write lock for atomicity
defer t.memMu.Unlock()
for _, op := range ops {
existing, _ := t.Get(row, op.Col, 1)
// Compute new value (increment or append)
// Write to WAL and memtable
}
}
Atomicity is achieved by holding the tablet’s memtable lock for the entire read-compute-write operation. This is a coarse-grained lock, but it’s correct: no other write can interleave with this operation. The paper describes a similar atomic CheckAndMutate operation for conditional writes.
14. Master Server
type Master struct {
chubby *Chubby
servers map[string]*TabletServer
schemas map[string]*TableSchema
assignments map[string]*TabletAssignment
unassigned []TabletID
}
The master is kind of like a manager who does zero actual work but keeps the whole team from falling apart. It never touches your data directly , clients never talk to it for reads or writes, but without it, nobody would know where anything lives. These are the operation master does:
- Tablet assignment: Tracking which tablet server owns which tablet.
- Server failure detection: Using Chubby watches to detect dead servers and reclaim their tablets.
- Load balancing: Moving tablets from overloaded servers to underloaded ones.
- Table creation: Creating schemas and initializing the first tablet.
Master Election
func (m *Master) Elect() error {
if !m.chubby.TryLock("/bigtable/master-lock", m.session) {
return errors.New("another master is already running")
}
m.isMaster = true
}
At most one master is active at any time, enforced by the Chubby lock. If the active master dies, the lock is released and a standby master can acquire it.
Server Monitoring
func (m *Master) checkServerLiveness() {
for id := range m.servers {
lockPath := "/bigtable/servers/" + id
if !m.chubby.IsLockHeld(lockPath) {
// Server is dead: reclaim all its tablets
for tabletStr, a := range m.assignments {
if a.ServerID == id {
m.unassigned = append(m.unassigned, a.TabletID)
delete(m.assignments, tabletStr)
}
}
delete(m.servers, id)
}
}
m.assignTablets()
}
Every 5 seconds, the master checks all known server lock paths in Chubby. If a lock is no longer held (the server died or its lease expired), the master marks all of that server’s tablets as unassigned and calls assignTablets() to redistribute them.
Tablet Assignment
func (m *Master) assignTablets() {
for _, tabletID := range m.unassigned {
// Find server with minimum current tablet count
// Register schema on that server, call ts.LoadTablet()
}
}
Assignment uses a greedy minimum-load heuristic: always assign to the server with the fewest tablets. A production system would factor in disk usage, memory pressure, and I/O load.
Load Balancing
func (m *Master) rebalance() {
// Find most-loaded and least-loaded servers
// If difference > 1, move one tablet from max to min
}
The rebalancer runs every 30 seconds and moves one tablet per cycle from the most-loaded server to the least-loaded. Moving tablets gracefully requires UnloadTablet (which flushes the memtable) followed by LoadTablet (which recovers from the log).
Table Creation
func (m *Master) CreateTable(schema *TableSchema) error {
m.schemas[schema.Name] = schema
initialTablet := TabletID{Table: schema.Name, StartKey: nil, EndKey: nil}
m.unassigned = append(m.unassigned, initialTablet)
m.assignTablets()
}
A new table starts with exactly one tablet covering the entire row key space [nil, nil). As data accumulates, tablets are split by the tablet servers. This is the standard “start with one shard, split as you grow” approach used by many distributed databases.
15. Tablet Location Hierarchy
Every read and write needs to find the right tablet server first. Do that naively and you’re adding a network round trip to every single operation. Bigtable’s solution is a three-level hierarchy that can locate any of ~34 billion tablets in just three hops, and in practice, usually zero, thanks to client-side caching.
Finding the right tablet server for a given (table, row) pair is a three-level lookup, a B+-tree-like hierarchy that can address up to ~2^34 tablets with just three network round trips.
Level 0: Chubby file at /bigtable/root-tablet-location
└── Contains address of ROOT tablet
Level 1: ROOT tablet (part of METADATA table, never split)
└── Contains locations of all other METADATA tablets
Level 2: METADATA tablets
└── Contains locations of all user tablets
The client-side cache makes this hierarchy efficient in practice:
type TabletLocationCache struct {
cache map[string]TabletLocation
}
type TabletLocation struct {
ServerID string
TabletStr string
ExpiresAt time.Time
}
Cache entries have a 30-second TTL. On a cache hit, the client contacts the tablet server directly, zero overhead. On a miss or a stale entry (tablet moved), the client re-traverses the hierarchy.
func (c *Client) findTabletServer(table string, row RowKey) (*TabletServer, string, error) {
if loc, ok := c.locCache.Get(table, row); ok {
ts, err := c.master.GetTabletServer(loc.TabletStr)
if err == nil {
return ts, loc.TabletStr, nil
}
c.locCache.Invalidate(table, row)
}
// Re-lookup via METADATA hierarchy (simplified: ask master directly)
ts, tabletStr, err := c.master.FindTablet(table, row)
c.locCache.Put(table, row, TabletLocation{TabletStr: tabletStr, ...})
return ts, tabletStr, nil
}
The paper notes that the client library prefetches tablet locations to further reduce latency. Our implementation includes the cache invalidation path: when a write fails (suggesting the tablet moved), the cache entry is invalidated before retrying.
16. Client Library
The client library is the public API of Bigtable. It hides all the complexity of location lookup, retry logic, and mutation encoding behind a clean interface.
Put, Get, Delete
func (c *Client) Put(table string, row RowKey, col Column, value []byte) error
func (c *Client) Get(table string, row RowKey, col Column) (*Cell, error)
func (c *Client) Delete(table string, row RowKey, col Column) error
These are the basic CRUD operations. Put creates a MutationSet; Delete creates a MutationDelete (tombstone). Get calls GetVersions with maxVersions=1 and returns the first result.
GetVersions
func (c *Client) GetVersions(table string, row RowKey, col Column, maxVersions int) ([]*Cell, error)
Returns up to maxVersions historical versions, newest first. This is a key differentiator from traditional databases, Bigtable natively supports historical reads without needing a separate audit log.
Scan
func (c *Client) Scan(table string, startRow, endRow RowKey, families []string, maxVersions int) ([]*Cell, error)
Scans a row range. In a real multi-tablet deployment, the scan would need to contact multiple tablet servers as it crosses tablet boundaries. This implementation handles the common single-tablet case; the multi-tablet case would require iterating FindTablet as the scan progresses.
BatchWrite
func (c *Client) BatchWrite(table string, row RowKey, mutations []Mutation) error
Applies multiple mutations to a single row in one call. Because Bigtable guarantees per-row atomicity, all mutations in a batch either all succeed or all fail. This is important for maintaining consistency within a row (e.g., updating multiple columns of a user record atomically).
Increment and Append
func (c *Client) Increment(table string, row RowKey, col Column, delta int64) error
func (c *Client) Append(table string, row RowKey, col Column, data []byte) error
These are higher-level operations built on top of ReadModifyWrite. Increment reads the current integer value, adds delta, and writes back. Append reads the current byte slice and appends data. Both are atomic because ReadModifyWrite holds the tablet’s write lock.
17. Cluster Bootstrap
type Cluster struct {
Chubby *Chubby
GFS *GFS
Master *Master
TabletServers []*TabletServer
}
func NewCluster(numServers int) (*Cluster, error) {
gfs := NewGFS(GFSBaseDir)
chubby := NewChubby()
master := NewMaster(chubby, gfs)
master.Elect()
// Start N tablet servers
// Register each with the master
master.Start()
return cluster, nil
}
NewCluster is the top-level constructor that bootstraps the entire system. It wires together all components in the correct order:
- GFS first: All other components need storage.
- Chubby next: Master election and server registration depend on it.
- Master election: The master acquires its Chubby lock before doing anything else.
- Tablet servers: Each opens a session, acquires its lock, and starts background goroutines.
- Master starts: Now that it has servers registered, the master begins monitoring and assignment loops.
- Root tablet location published: The Chubby node is updated so clients can begin resolving locations.
Cluster.CreateTable is a convenience method that creates a TableSchema, registers column families, and calls Master.CreateTable.
Cluster.Stop gracefully shuts down all servers and the master, releasing locks in the process.
18. The Demo
Okay enough theory. Let’s actually run the thing.
Step 1–2: Cluster Boot and Table Creation
cluster, _ := NewCluster(3)
cluster.CreateTable("webtable",
&ColumnFamily{Name: "anchor", MaxVersions: 5},
&ColumnFamily{Name: "contents", MaxVersions: 3, Compression: "zlib"},
&ColumnFamily{Name: "language", MaxVersions: 1},
)
We boot a 3-server cluster and create a webtable, the same example Google uses in the paper, which is a nice full-circle moment. The table has three column families: anchor for link anchor text, contents for the actual page HTML, and language. Row keys are reversed domain names (com.google, com.cnn.www) so that pages from the same domain end up physically next to each other on disk. This significantly makes it faster.
Step 3–4: Writes and Reads
Nothing fancy here, just a basic put followed by a get to confirm the write path and read path actually talk to each other correctly. If this works, the plumbing is good.
Step 5: Multi-Version Reads
client.PutWithTimestamp("webtable", row, col, value, t0)
client.PutWithTimestamp("webtable", row, col, value, t1)
client.PutWithTimestamp("webtable", row, col, value, t2)
versions, _ := client.GetVersions("webtable", row, col, 3)
This is one of my favorite parts of Bigtable. We write the same cell three times with different timestamps, then ask for all three versions back. They come out newest-first. This is exactly how the web crawl use case works in production, every time Google re-crawls a page, it doesn’t overwrite the old content, it just writes a new version. You can always go back and ask “what did this page look like six months ago?”
Step 6: Range Scan
cells, _ := client.Scan("webtable", RowKey("com.a"), RowKey("com.z"), nil, 1)
One line, but a lot happening under the hood. This scans every row between com.a and com.z. which, because of our reversed domain name trick, means every .com domain. The lexicographic ordering does all the heavy lifting here; this is not filtering per se, just exploiting how the data is laid out.
Step 7–8: Atomic Counter and Append
client.Increment("usertable", userRow, counterCol, 1) // 5 times
client.Append("usertable", userRow, logCol, []byte("|search"))
Both of these go through ReadModifyWrite, which holds the tablet’s write lock for the entire read-compute-write cycle. That’s what makes them atomic. Increment is exactly what you’d use for page view counts. Append is perfect for activity streams, every action just gets tacked onto the end of a log column.
Step 9: Deletion
client.Delete("webtable", row, col)
Looks simple, but this doesn’t actually delete anything yet. It writes a tombstone, a marker that says “this cell is gone.” The data physically disappears only when the next major compaction rolls around and merges everything together. Until then, the read path just sees the tombstone and skips over the old versions. It’s a bit like marking an email as deleted without emptying the trash.
Step 10: Compaction Under Load
for i := 0; i < 1000; i++ {
client.Put("webtable", randomRow, col, value)
}
time.Sleep(2 * time.Second)
We hammer the table with 1000 writes to push the memtable over its 4MB threshold and trigger the background minor compaction loop. After the sleep, peek inside /tmp/bigtable_gfs/sstables/, you’ll actually see the SSTable files sitting on disk. That’s real data, written by the system we just built.
Step 11: Batch Write
server.Write(tabletStr, row, []Mutation{
{Col: Column{"profile", "name"}, Value: []byte("Alice")},
{Col: Column{"profile", "email"}, Value: []byte("alice@example.com")},
{Col: Column{"activity", "pageviews"}, Value: []byte("0")},
})
Three columns, one call, one atomic operation. Either all three land or none of them do. This is per-row atomicity in action, if you’re creating a user record and the server dies halfway through, you won’t end up with a row that has a name but no email address.
19. Data Flow Summary
Alright, let’s tie it all together. Here’s what actually happens under the hood when you do a single write, from your client call all the way to durable storage.
How the write operates
First, the client’s write request must reach the correct tablet server and be durably persisted:
sequenceDiagram
participant Client
participant Cache as TabletLocationCache
participant TS as TabletServer (ts-1)
participant Chubby
participant CommitLog
participant GFS
Note over Client,GFS: Phase 1: Write Request & Durability
Client->>TS: Put("webtable", "com.google", Column{"anchor","Google"}, "Google HQ")
TS->>Cache: findTabletServer()
Cache-->>TS: Cache hit → ("ts-1", "webtable[nil,nil)")
TS->>Chubby: Verify session (ACL check)
Chubby-->>TS: OK
TS->>CommitLog: Append(tabletID, cell)
CommitLog->>GFS: JSON encode LogRecord → /tmp/bigtable_gfs/logs/ts-1.log
GFS-->>CommitLog: seqNo = 42
CommitLog-->>TS: Ack (Write is durable)
sequenceDiagram
participant TS as TabletServer (ts-1)
participant Tablet
participant Memtable
participant Cache as ScanCache
Note over TS,Cache: Phase 2: Apply to Memtable
TS->>Tablet: Apply(cell)
Tablet->>Memtable: Insert(cell)
Memtable-->>Tablet: Binary search insert
Tablet-->>TS: Current size = 1.2MB
TS->>Cache: Invalidate("com.google:anchor:Google")
Cache-->>TS: Cache entry removed
Note over TS,Memtable: Memtable threshold: 4MB
Note over TS,Memtable: Current: 1.2MB (no flush needed)
When memtable exceeds 4MB, background goroutines handle persistence:
sequenceDiagram
participant TS as TabletServer
participant Tablet
participant Memtable
participant MinorBG as MinorCompaction Goroutine
participant MajorBG as MajorCompaction Goroutine
participant GFS
Note over TS,GFS: Phase 3: Compaction (Triggered when memtable ≥ 4MB)
alt Memtable size >= 4MB
TS->>MinorBG: Signal minorFlushCh
activate MinorBG
MinorBG->>Tablet: MinorCompaction()
MinorBG->>Memtable: Freeze current memtable
MinorBG->>Tablet: Create new memtable
MinorBG->>GFS: Write SSTable (Finish)
GFS-->>MinorBG: SSTable written
MinorBG->>Tablet: Register SSTableReader (newest first)
Tablet-->>MinorBG: Total SSTables = 6
alt len(sstables) >= 5
MinorBG->>MajorBG: Signal majorCompactCh
activate MajorBG
MajorBG->>Tablet: MajorCompaction()
Note over MajorBG,Tablet: Merge multiple SSTables
to reduce read amplification
deactivate MajorBG
end
deactivate MinorBG
end
And a read:
Every read starts with locating the tablet and checking the query result cache:
sequenceDiagram
participant Client
participant TS as TabletServer (ts-1)
participant Cache as TabletLocationCache
participant Tablet
participant ScanCache
Note over Client,ScanCache: Phase 1: Request Routing & L1 Cache
Client->>TS: Get("webtable", "com.google", Column{"anchor","Google"})
TS->>Cache: findTabletServer()
Cache-->>TS: Cache hit → "ts-1"
TS->>Tablet: Read(row="com.google", column="anchor:Google")
Tablet->>ScanCache: Lookup("com.google:anchor:Google")
ScanCache-->>Tablet: Cache Miss
Note over Tablet: ScanCache miss → Must read from storage layers
On cache miss, Bigtable reads from three storage layers in order of freshness:
sequenceDiagram
participant Tablet
participant Memtable
participant ImmMem as Immutable Memtables
participant SSTable
participant Bloom
participant Block
Note over Tablet,Block: Phase 2: Multi-Level Storage Read
Note over Tablet: Level 1: Active Memtable
Tablet->>Memtable: Get(key, maxVersions=1)
Memtable-->>Tablet: [Cell{value="Google HQ", ts=1234567}]
Note over Tablet: Level 2: Immutable Memtables (pending flush)
loop For each immutable memtable
Tablet->>ImmMem: Get(key)
ImmMem-->>Tablet: [] (empty)
end
Note over Tablet: Level 3: SSTables (newest → oldest)
loop For each SSTable
Tablet->>Bloom: MightContain("com.google\x00anchor\x00Google")
Bloom-->>Tablet: true (possible match)
Tablet->>SSTable: Binary search index
SSTable-->>Tablet: block 0 @ offset 0
Tablet->>Block: Decode block
Block-->>Tablet: [Cell{value="Google HQ", ts=999}]
end
Note over Tablet: Results collected:
Memtable: ts=1234567
SSTable: ts=999
Bigtable’s multi-versioning requires merging results from all layers:
sequenceDiagram
participant Tablet
participant Merger
participant ScanCache
participant TS as TabletServer
participant Client
Note over Tablet,Client: Phase 3: Version Reconciliation & Response
Note over Tablet: Collected results:
• Memtable: ts=1234567
• SSTable: ts=999
Tablet->>Merger: mergeCells(allResults, maxVersions=1)
Note over Merger: 1. Sort by timestamp desc
[1234567, 999]
2. Apply version limit
Keep only latest (1234567)
3. Apply tombstone rules
Merger-->>Tablet: [Cell{value="Google HQ", ts=1234567}]
Note over Tablet: Update cache for future reads
Tablet->>ScanCache: Store("com.google:anchor:Google", result)
ScanCache-->>Tablet: Cached
Tablet-->>TS: Cell{value="Google HQ", ts=1234567}
TS-->>Client: Cell{value="Google HQ", ts=1234567}
Conclusion
If you’ve made it this far, here’s a cheat sheet of everything we built and how it maps back to the paper. Turns out one Go file can do a lot.
| Paper Concept | Implementation |
|---|---|
| Sparse sorted map | CellKey ordering with CompareCellKeys |
| Column families | ColumnFamily, TableSchema |
| Multi-version storage | Timestamp in CellKey, mergeCells |
| GFS integration | Simulated GFS struct |
| Chubby integration | Full Chubby with sessions, locks, watches |
| Commit log (WAL) | CommitLog with sequence numbers and replay |
| Memtable | Sorted []MemtableEntry with freeze/swap |
| SSTable | Block format with index and bloom filter |
| Minor compaction | Memtable → SSTable flush |
| Major compaction | Multi-SSTable merge with tombstone elimination |
| Tablet split | Median-key split returning two new tablets |
| Tablet server | Background goroutines, merged read view, WAL |
| Master server | Election, assignment, failure detection, rebalancing |
| Three-level location hierarchy | Chubby → METADATA → user tablets |
| Client-side caching | TabletLocationCache with TTL |
| Per-row atomicity | Single-call batch mutations |
| Read-modify-write | Atomic increment and append |
The major simplifications versus a production system are: using encoding/json instead of a binary format, using a local filesystem instead of real GFS, using a sorted slice instead of a skip list for the memtable, and omitting network RPC (everything runs in-process). But the architecture, data flow, and algorithms are faithful to the original paper.
Similar blog posts:
In the next blog in this paper implementation series, I’ll implement the Google File System paper. Maybe even integrate to this implementation. Stay tuned! Subscribe to the newsletter if you haven’t yet.